|
I am actively seeking employment (contract or FTE) - please reach out! I'm particularly excited about opportunities in conservation, ecology, and sustainability. I have deep experience in computer vision and reinforcement learning, and recent experience with large language models. Previously, I worked on using LLMs to improve the peer review and editing process in publishing as part of the RnD team at Hum. Before that, I was a Research Scientist on the AI Research Team at Cruise, where I worked on prediction and planning for simulation testing of the autonomous vehicle. In 2021, I spent time as a Research Scientist Intern at DeepMind. I received my PhD in AI from UC Berkeley in 2021, where I was advised by Sergey Levine as part of BAIR. During my PhD I also worked with Alyosha Efros and Trevor Darrell. I completed my Bachelor's in EECS at UC Berkeley, where I did undergraduate research with Shiry Ginosar and Alyosha Efros in computer vision as well as Insoon Yang and Claire Tomlin in control. Email / CV / Google Scholar / LinkedIn |

|
|
Machine learning (ML) algorithms excel in solving specific problems when lots of data is available. Broadening the abilities of ML models to acquire new concepts from a few examples in the way that humans can remains a challenge, in that the model must be able to re-use knowledge gained in one setting and apply it in another. To this end, my PhD research focused on learning deep representations that could be quickly adapted to learn to recognize new concepts or perform new tasks. I developed algorithms applying this idea in the contexts of image segmentation and robotic control. I also studied the information-theoretic limitations of some common ways of learning deep representations for control. I got my start in ML in undergrad where I contributed to a project applying semi-supervised learning techniques to historical photographs to discover trends in fashion and hairstyle over the past century. |
|
|
 
|
|
 
|
|
 
|
|
|
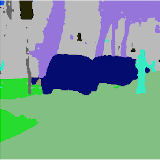
A fast video recognition framework that relies on two key observations: 1) while pixels may change rapidly from frame to frame, the semantic content of a scene evolves more slowly, and 2) execution can be viewed as an aspect of architecture, yielding purpose-fit computation schedules for networks. We define a novel family of "clockwork" convnets driven by fixed or adaptive clock signals that schedule the processing of different layers at different update rates according to their semantic stability. |
 
|
What were the tell-tale fashions of the 1950s? Did everyone in the 70s really have long hair? In this age of selfies, is it true that we smile in photos more than we used to? And can a CNN pick up on all these trends to accurately date an old portrait? We address these questions and many others using data-driven semi-supervised learning techniques on a novel dataset of American high school yearbook photos from the past 100 years. |
|
|
|
An Inference Perspective on Meta-Reinforcement Learning - An invited talk at the Neurips 2020 Workshop on Meta-Learning. I make a case for why viewing meta-RL as task inference is a fruitful direction for future research in meta-RL. An Inference Perspective on Meta-Learning - An invited talk at the Sheffield Seminar, a weekly seminar of the Machine Learning group at Sheffield University. I talk about how meta-learning as inference leads to effective algorithms for few-shot learning not just in RL, but also in image segmentation. An Overview of Meta-Reinforcement Learning - A guest lecture presenting an overview of meta-RL in the Fall 2019 offering of CS294 at UC Berkeley Exploration in Meta-RL - A guest lecture looking at the problem of exploration in meta-RL in the Fall 2019 offering of CS330 at Stanford University Efficient Meta-RL with Probabilistic Context Embeddings - contributed talk to the Workshop on Structure and Priors in RL at ICLR 2019 |
|
|
|
Which Mutual Information Representation Learning Objectives are Sufficient for Control? - on the BAIR blog about our work on analyzing representation learning objectives for RL. Learning to Learn with Probabilistic Task Embeddings - on the BAIR blog about our work on off-policy meta-RL. |
|
|
|
A collection of collateral damage from doing research that might be useful to others. pytorch-maml - a PyTorch implementation of Model-Agnostic Meta Learning for supervised learning. |
|
|
|
Deep Reinforcement Learning is a special topics course covering modern deep reinforcement learning techniques.
Discrete Mathematics for Computer Science covers proof techniques, modular arithmetic, polynomials, and probability.
Introduction to Circuits covers analyzing, designing, and building electronic circuits using op amps and passive components. (Note this class along with EE20 have been replaced by the EE16A/B series as of Fall 2015.) |
|
|
|
English (fluent), Spanish (proficient) |
|
|
|
My other interests include singing, guitar, live music, rock climbing, and trying new foods. |
|
|